3Dプリンタで部品を造形
前に設計したパンチルトカメラの部品4点を3Dプリンタで造形します。
まず、3D CADで各部品の3DデータをSTL形式で出力します。単位はミリメートル、精度は中~高を選びます。
スライサー(主にSimplify3Dを使っています)でSTLを読み込み、造形パラメータを設定、3Dプリンタに渡すG-codeを出力します。
そして、造形開始!
4点の部品ができあがりました。
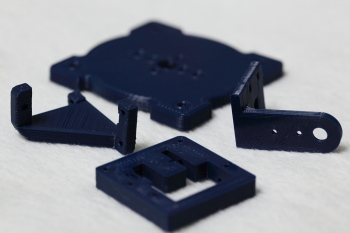
積層ピッチ0.3mmで造形しましたが、部品サイズが小さいので、あっという間にできあがりました。これならば積層ピッチ0.2mmか0.1mmでもよかったと思います。
組み立て
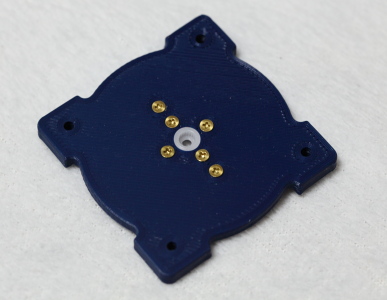
部品には穴が開いていますが、3Dプリンタで造形した部品は穴径の精度が良くなく、穴の内面も荒いので、各穴にドリルを通して整えておきます。
サーボホーンには元々約1mmの穴が開いていますが、ここに1.4mmのドリルを通してからM2のタップをたてます。
そしてRCサーボ、サーボホーンをネジ止めしていきます。ネジはM2のナベ小ネジ、皿小ネジとナットを使っています。
ここで1つ問題発生・・・実はサーボホーンが左右対称ではなく、ベースの底面に填りません。そこでサーボホーンのアームを少しカットして対応しました。
他には問題なく、3つの部分が組み上がりました。
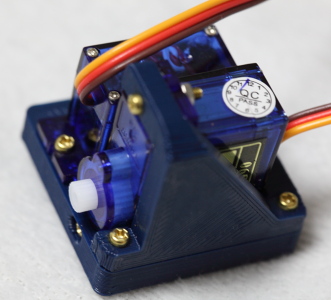

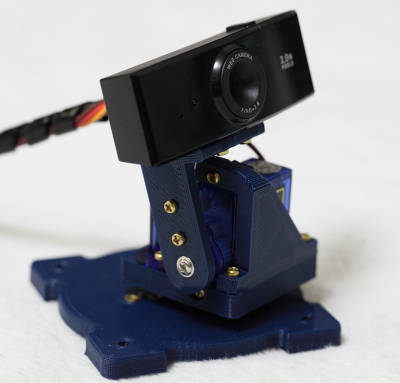
全体組立
サーボを中点にしてから、3つの部分を組み合わせます。
しかし、サーボをぴったり中点にしたとしても、サーボの軸とサーボホーンの穴には滑り止めのギザギザがあるために、ぴったりの角度に組み立てられません。 どうしても少しだけずれてしまいます。
必要ならば、中点の角度ずれはパラメータ調整で対応することにします。
完成です。